OCR:CRNN+CTC開源加詳細解析
Posted on October 12, 2020 in AI.ML. View: 11,856
場景文字辨識 OCR (Optical Character Recognition) 應用場景非常多,例如:Evernote提供的名片辨識、諸多銀行內部使用的存摺影像辨識、新型停車場提供的車牌辨識系統、證件識別工具、旅遊業會用到護照識別,不勝枚舉!凡是想要將生活場景中的文字藉由機器去讀取的都是OCR的範疇,它會為企業省下許多人工判讀的人力成本。
在場景文字辨識中相當經典的模型就是 CRNN+CTC,Github 上也有許多相關的 Repo.,但 YC 發現沒有一個將這個模型寫的夠好、夠容易修改的 pytorch 開源程式碼,所以 YC 決定自己幹一個並且將它開源,目前搭配資料集 Synth90k 已經可以在英文辨識上做到 93.9 % 的 Sequence Accuracy,歡迎大家來嘗試使用!
開源:pytorch版本的CRNN+CTC
👆🏼👆🏼👆🏼👆🏼👆🏼
麻煩大家不吝給予星星 ⭐️,並且分享給更多人知道!



網路架構
CRNN+CTC 結構源於論文An End-to-End Trainable Neural Network for Image-based Sequence Recognition and Its Application to Scene Text Recognition (2015), Baoguang Shi et al.,其網路架構其實並不複雜,講白了就是 CNN 的 Backbone 再搭配 Bi-directional RNN,最後對每個時間點作Softmax分類問題,但是在衡量輸出時則是需要綜觀每個時間點的 CTC Loss。
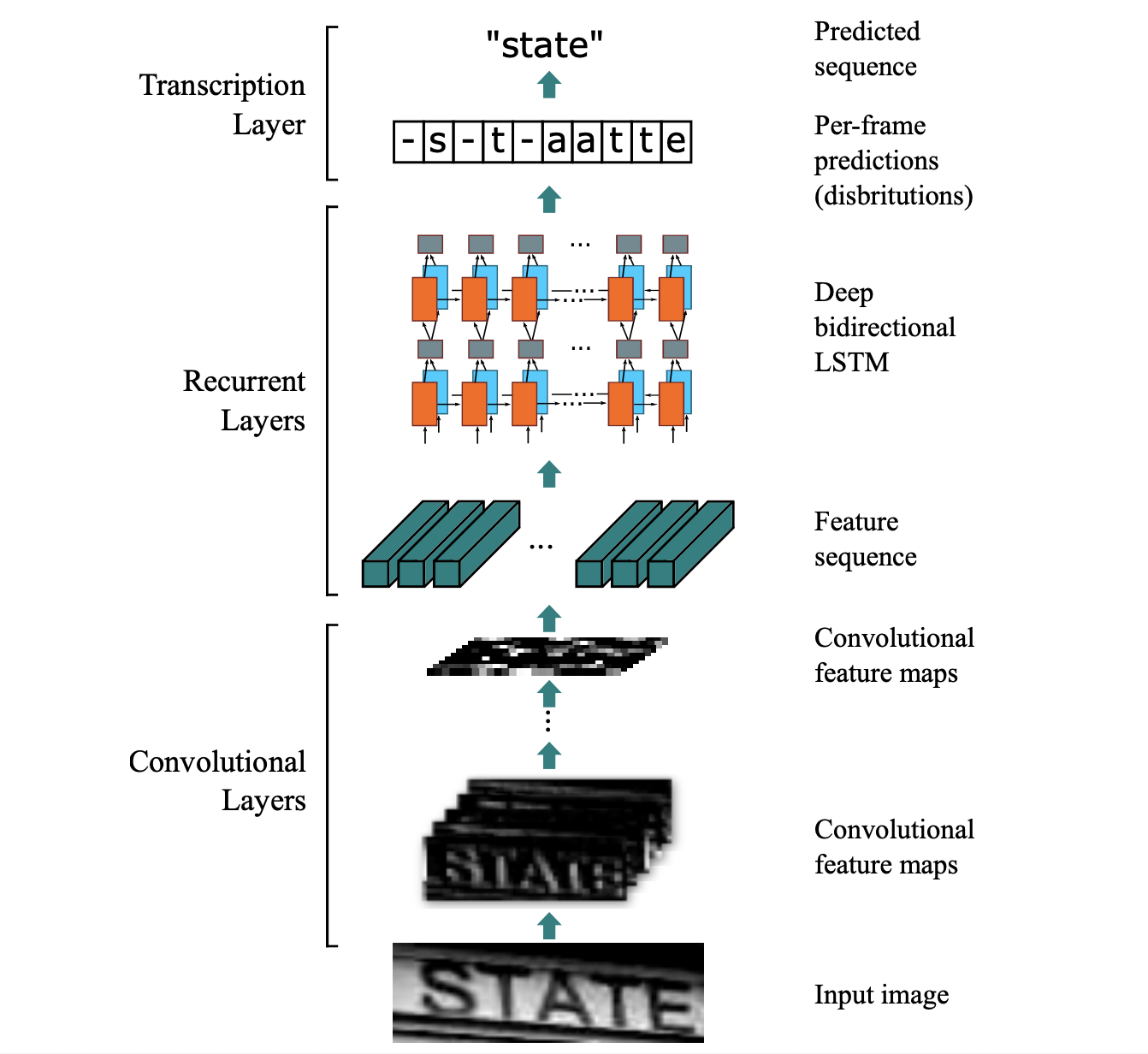
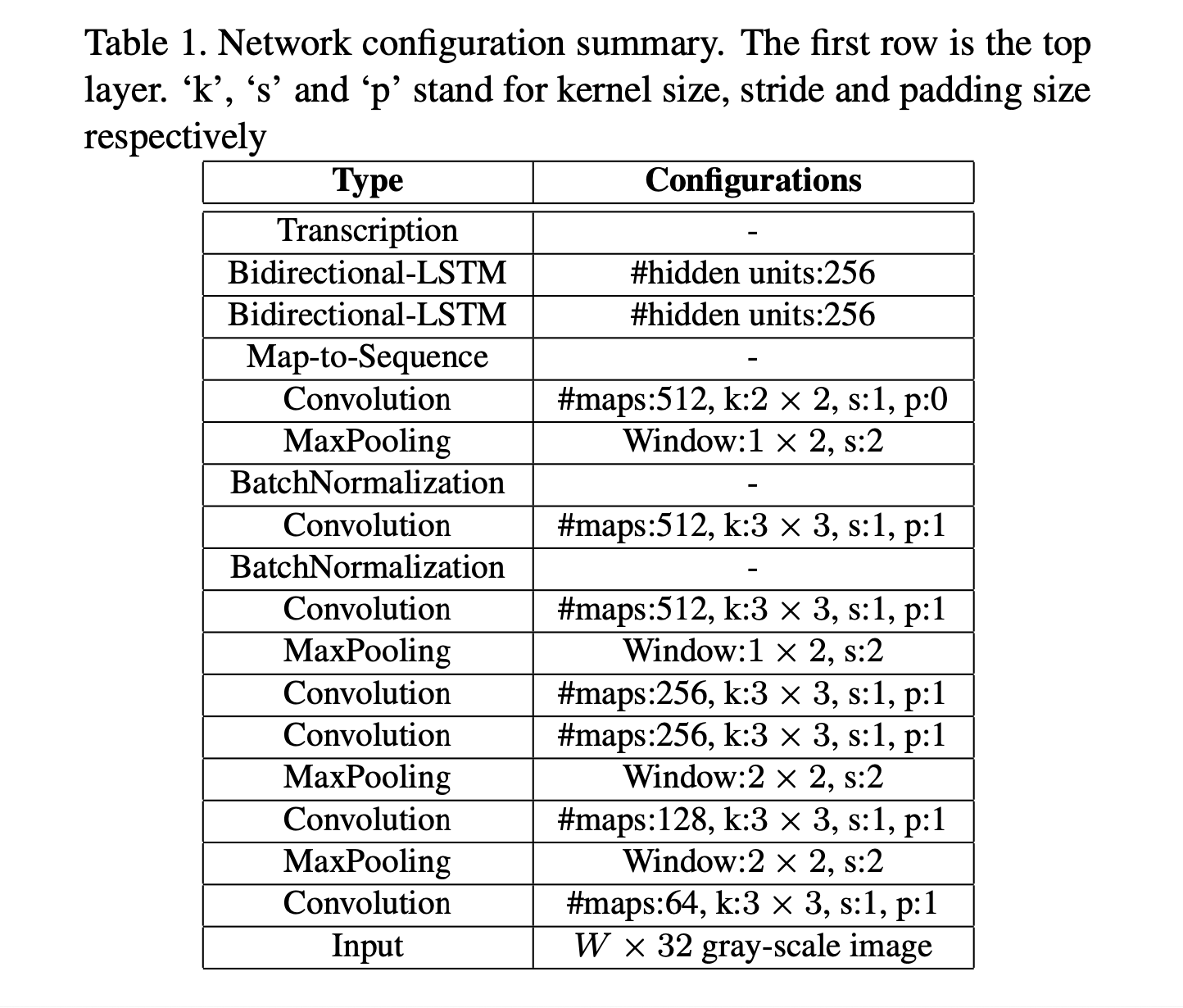
首先,將圖片轉成灰階並且伸縮至高度32,通過多層的Conv2D、MaxPool和BatchNormalization抽取圖片相關的特徵。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 | |
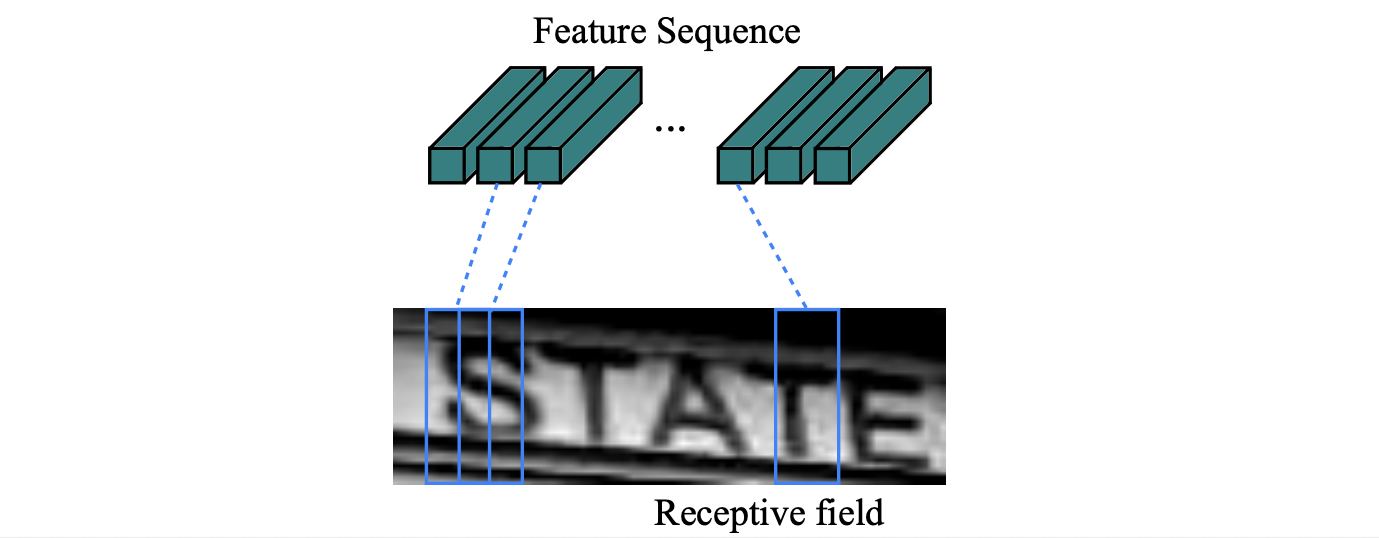
接下來藉由一個 DenseLayer 去將圖片轉成維度為 map_to_seq_hidden 的序列,這樣就可以接續的使用 RNN 來萃取序列的特徵。
1 | |
這邊特別注意一下,當你經過 CNN Backbone 之後的維度是:(batch, channel, new_height, new_width) ,但是你希望進RNN前的維度是:(seq_len, batch, map_to_seq_hidden) ,所以需要將 channel, new_height 攤平再過 DenseLayer,如下:
1 2 3 | |
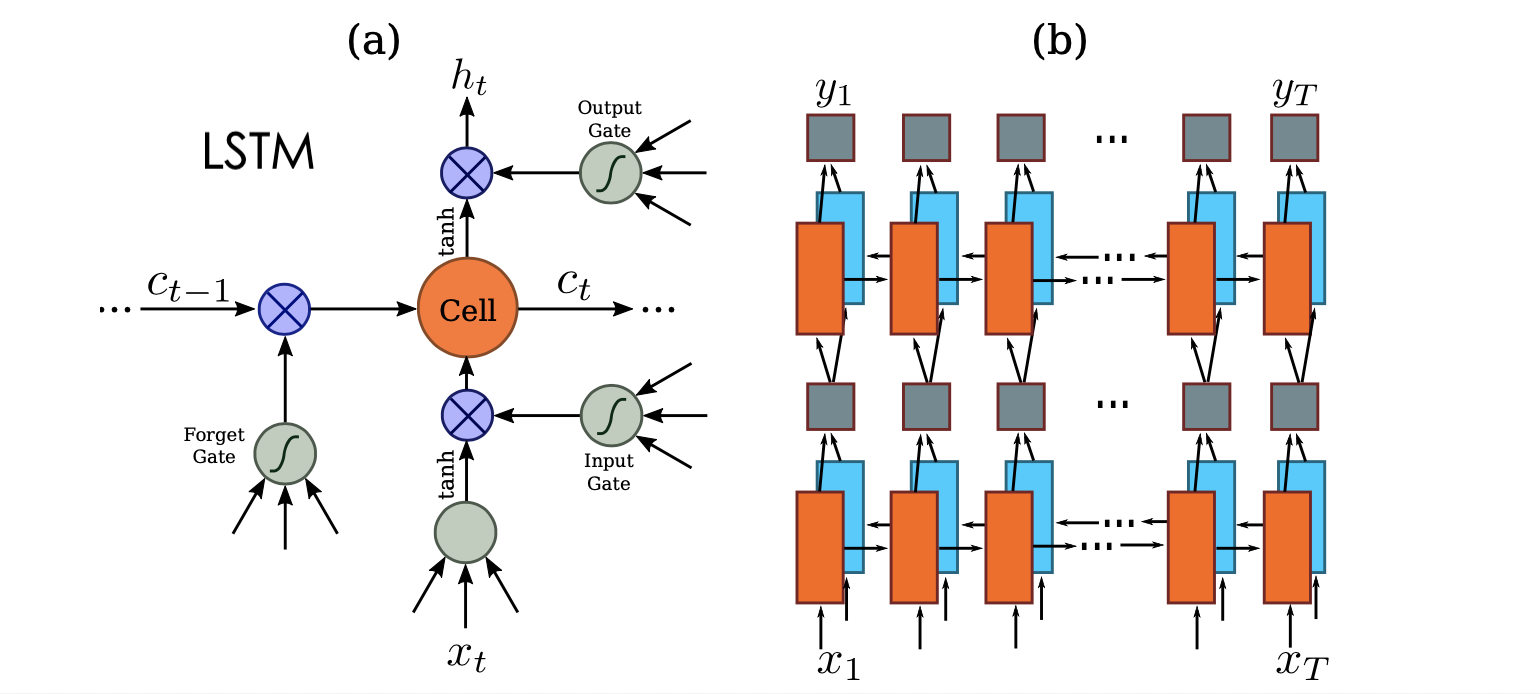
最後再過兩層 Bi-directional LSTM 萃取序列相關的特徵,並且過 DenseLayer 來將維度轉成與分類的數量相同,再過 Softmax 就大功告成!注意:分類的類別是所有要預測的字元再加上 blank ε ,一般我們會讓 blank ε 在Onehot Encoding 時放在 index=0 的位置。
詳細模型架構請詳見:src/model.py
CTC (Connectionist Temporal Classification)
RNNs 與其他傳統方法相比,如:HMMs (Hidden Markov Model) 和 CRFs (Conditional Random Field) 有以下優勢:
- RNNs 無須多餘的先驗假設
- RNNs 提供了相當強大且一般化的機制去描述時間序列
但是 RNNs 只能訓練在已經分配好的序列上,所以當你僅有 Sequence Label 是不夠的,還需要知道這些 Label 要怎麼被分配。舉個例子:如果今天你要辨識的圖片包含 "CAT" 這個詞,你想要使用 RNN 進行辨識,而這個 RNN 長度假設為 7,為了要能訓練 RNN 我們需要給它 Ground True,此時你就需要將 "CAT" 這 3 個字分配到 7 格中,但是這樣的標注是費工的、不切實際的,我們希望可以直接訓練在沒有分配前的 Sequence Label 上。
CTC 設計了一個機制讓我們可以做到這件事:
- 在原本要預測的字元中多加入了 blank ε
- 透過映射機制 \(B\) 將 RNN 的輸出轉化成 Sequence Prediction
- 映射機制 \(B\):合併相鄰的字元並且除去 blank ε
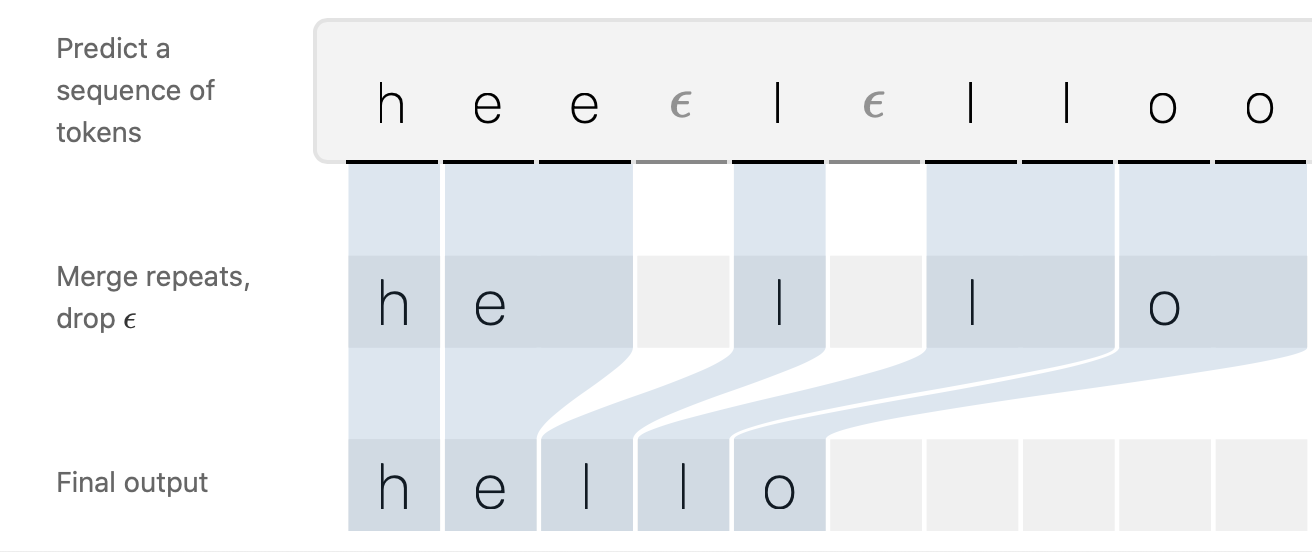
有了這個映射機制 \(B\) 我們就可以不需要事先分配 Sequence Label 也能訓練網路,但是要注意:能映射到一組 Sequence Label 的可能性是有很多組合的,例如:"hee-l-lloo" 和 "hheel-lloo" 都會映射到 "hello",所以要特別去設計它的 Loss 讓其可以考慮各種可能性,這會在下一節中仔細闡述。
CTC Loss: Forward-Backward Algorithm
接下來這一個部分將會是本篇最難理解的部分,而且也最為數學,所以在陷進去數學漩渦之前,我們先來概念性的了解 CTC Loss 究竟是做了什麼。簡言之,我們需要讓 CTC Loss 降低的同時,等同於做到提升產生 Ground True Sequence Label 的機率,而在映射函數 \(B\) 的作用下產生這個 Ground True Sequence Label 會有多種來源組合,這些組合都必須被考慮進去,然後我們有了 CTC Loss 與參數的關係式就可以使用梯度下降進行優化。
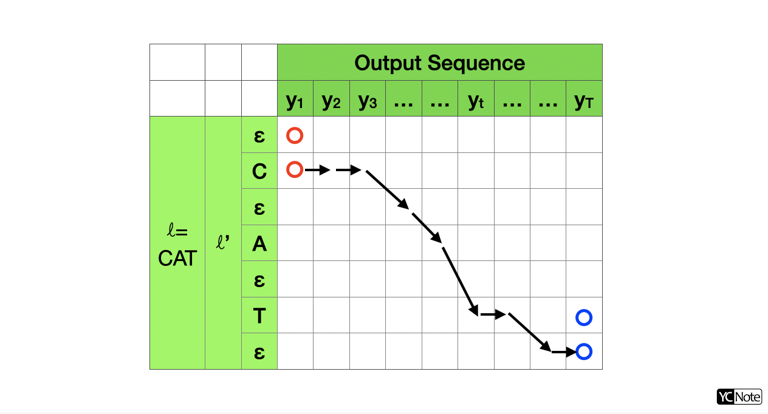
所以我們需要窮舉所有可能的組合才能正確的將產生 Ground True Sequence Label 的機率算出來,我們就來試著羅列。假設我們的 Sequence Label 是 "CAT" ,見圖一,所以我們的 \(\ell\) 為 "CAT",為了把 blank ε 列入考慮,我們設計了 \(\ell'\),其長度關係為 \(|\ell'|=2|\ell|+1\) 。參照映射函數的規則,只有圖中兩個紅點是可能的出發點、兩個藍點是可能的結束點,因此我們需要羅列從出發點到結束點可能的路徑 \(\pi\),這些路徑都可以在經過映射函數 \(B\) 後產生 Sequence Label "CAT" 。
加總所有可能透過 \(B\) 映射至 Ground True Sequence Label \(\ell\) 的條件機率:
其中:
\(y^{t}_{π_t}\) 表示在時間 \(t\) Label 為 \(π_t\) 的機率。
而我們的目標就是想要最大化 \(p(\ell|y)\) ,取 \(ln\) 在加上負號,就會變換成為最小化問題:
只要算其微分,就可以使用梯度下降的方法進行優化:
所以只要解決兩件事:如何計算 \(p(\ell|y)\) 和 \(\frac{\partial p(\ell|y)}{\partial y}\) ,就可以優化參數了!
但是窮舉各種可能路徑有這麼簡單嗎?幸好我們有 Dynamic Programming ,這裡借鏡解 HMM 優化問題會使用的 Forward-Backward Algorithm 來解決這個問題。 Dynamic Programming 是一種遞迴的演算法,只要有初始值和遞迴式就可以一路算下去。運用在這個問題上,我們只需要找到在 \(y_t\) 和 \(y_{t-1}\) 的機率累加遞迴關係,以及 \(y_1\) 時刻的機率分布,就可以一路算到最後一個時刻點 \(T\) 的機率累積。
首先,我們先來定義「Forward Algorithm」的 \(\alpha\) :
\(\alpha_t(s)\) 表示從可能的起始點累積到 \(t\) 時刻且 Label \(\ell'=s\) 那點的總機率,可以從式子的右式看出,加總所有能將 \(π_{1:t}\) (圖一中的衡欄) 映射到 \(\ell_{1:s}\) (圖一中的縱欄) 的路徑 \(\pi\) ,並且將這路徑 \(\pi\) 上的各點機率相乘 (因為互為獨立事件)。
再參照圖一和【1】式,我們知道 \(p(\ell|y)\) 可以用 \(\alpha_t(s)\) 表示:
右式的兩項代表結束的兩個藍點。
從【5】式我們可以得到 \(t=1\) 的初始值,因為只有兩個紅點是可能的路徑,所以得到:
從【5】式我們也可以得到遞迴式:
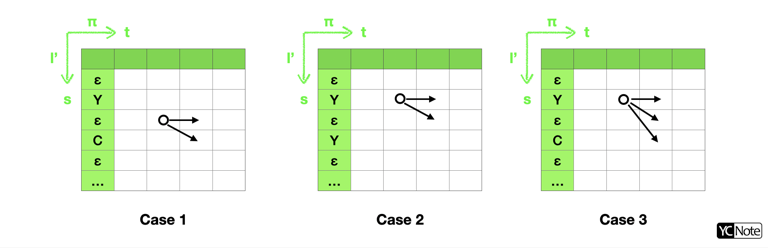
連接到 \((t,s)\) 可分為三種路徑情況,如下圖:
所以我們可以把【8】遞迴式寫得更加清楚:
善用【9】式遞迴式和【7】式初始值,你就可以求得圖一中所有格子的 \(\alpha_t(s)\) 值,再藉由【6】式就可以得到 \(p(\ell|y)\)。
我們順利的解決了【4】式中的 \(p(\ell|y)\),那接下來只剩下 \(\frac{\partial p(\ell|y)}{\partial y}\),為了算這一項我們還需要「Backward Algorithm」,「Backward Algorithm」的 \(\beta\) 定義如下:
從【10】式我們可以得到 \(t=T\) 的初始值,因為只有兩個藍點是可能的路徑,所以得到:
從【10】式我們也可以得到遞迴式:
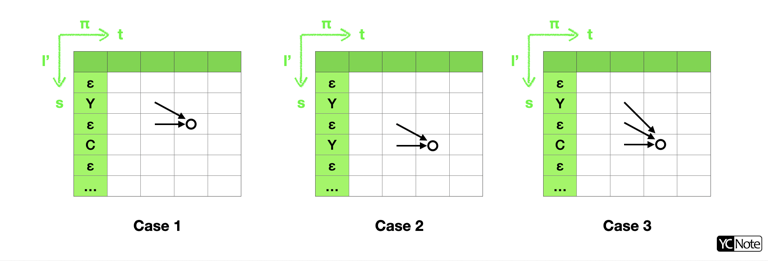
從 \((t,s)\) 連接的情況一樣也可分為三種情況,如下圖:
所以我們可以把【12】遞迴式寫得更加清楚:
當我們把 Forward Algorithm 和 Backward Algorithm 合在一起就會得到一個好用的公式,綜【5】和【10】式:
再考慮【2】式
再考慮【1】式
【16】式提供了另外一個求 \(p(\ell|y)\) 的方法,而且這個算法可以在任意時間點 \(t\) 作計算,更棒的是它可以讓我們很方便的求得 \(\frac{\partial p(\ell|y)}{\partial y}\) :
因為微分的關係,上式加總中與 \(y_k^t\) 無關的項都會化為零,可以進一步改寫:
因此綜【6】和【18】我們就可以解【4】式,然後就可以對網路做反向傳播優化參數了!
Inference of CTC
在 GitYCC/crnn-pytorch 中我有實作了三種 CTC 的 Inference 方法,分別為 greedy_decode、beam_search_decode 和 prefix_beam_decode,精確度依序越來越準確,但是隨著精確度提高所花的 Inference 時間也就越長。
事實上,這三種方式都不是最佳解,真正的最佳解得枚舉出所有可能的 Sequence Label 組合再取最大機率的那一個,它必須要衡量 \((C+1)^T\) 條路徑且每條路徑都需要要做 \(T\) 次的乘法,所以時間複雜度為 \(O(T\times (C+1)^T)\),這個計算量大到不切實際,假設英文字母 \(C=26\) ,然後 \(T\) 假設為 \(20\),時間複雜度會達到 \(8.4e\text{+}29\)。
所以接下來我會逐一介紹三種常見的近似方法。
Greedy Decode
這是最 heuristic 的方法,直接找在每個時間點 \(t\) 最大的 \(s\) 當作路徑 \(\pi^*\) 再過映射函數 \(B\)。這個方法雖然簡單,但在大部分情況下會是正確的。在最佳解時我們希望的是在過完映射函數 \(B\) 之後得到最大可能的路徑 \(\ell^*\) ,所以需要考慮所有可能的路徑並將其機率加總才能得到最佳解,但是 Greedy Decode 則是只考慮了最高機率的一條路徑。
1 2 3 4 | |
Beam Search Decode
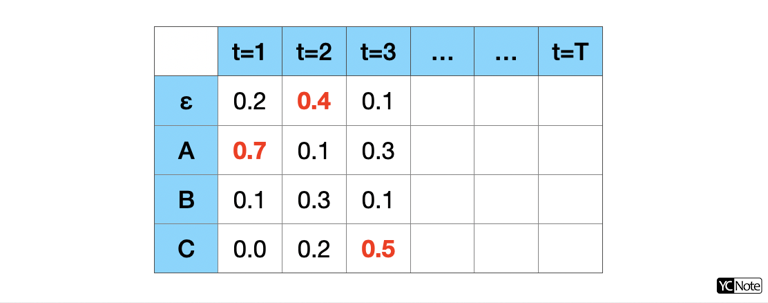
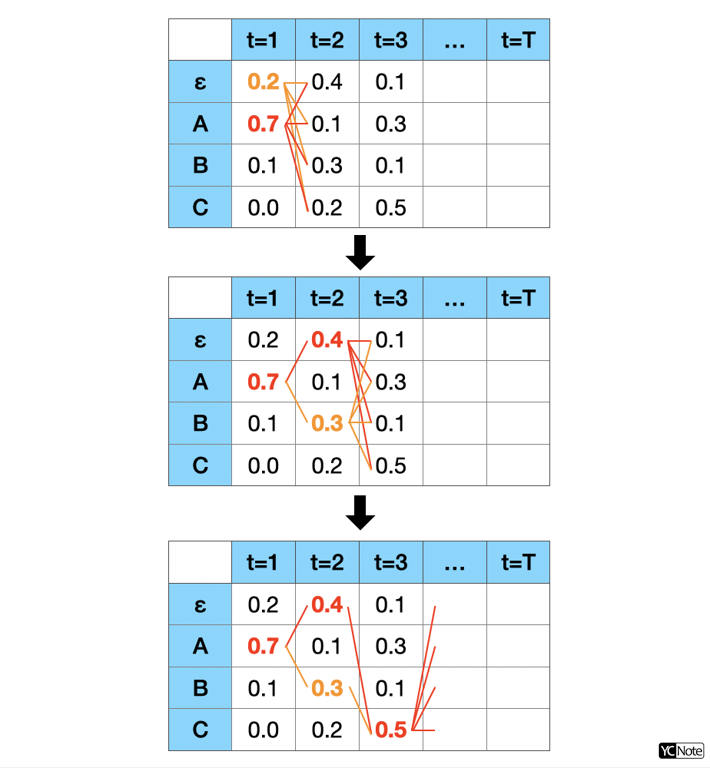
既然只選一條機率最大的路徑不那麼精確,那麼我就選最大的前 \(k\) 條路徑再將其機率相加,這個就是 Beam Search 的近似方法。為了達到這個目的,我們在每一個時間點 \(t\) 都會保留前 \(k\) 條累積相乘機率最大的可能路徑,如下圖所示。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 | |
其中用到 logsumexp 的用意是因為我們操作在 Log Probability 上面,雖然機率相乘即是 Log Probability 相加,很方便操作。但是如果碰到需要機率相加時,就需要先取 \(exp\) 還原後再相加再取 \(log\) ,即:\(log(p1 + p2) = logsumexp([log(p1), log(p2)])\)。
Prefix Beam Search Decode
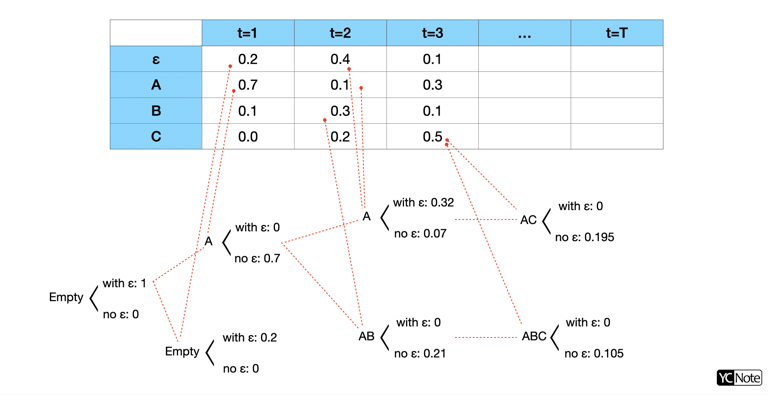
我們可以再進一步讓它更精確一點,剛剛的 Beam Search 是在映射函數 \(B\) 之前找 \(k\) 條路徑,Prefix Beam Search 更進一步拿前 \(k\) 條經過映射函數 \(B\) 後的 Prefix 當作評估的方式 ,如此會更接近我們想要找到映射後的最高機率的 Sequence。
在 Prefix 的世界裡不存在 blank ε,但是 blank ε 卻是會影響 Prefix,例如:"A-A" 映射完會是 "AA",但是 "AA" 映射完則會是 "A" ,所以在 Prefix Beam Search 存在 ProbabilityWithBlank 和 ProbabilityNoBlank 兩種累積機率,這兩種情況分別是結尾有 blank 的累積機率和結尾沒有 blank 的累積機率,特別注意:累積機率代表從開始到目前的總機率。
有了這個概念,我們來看會遇到什麼樣的狀況,並且在每個狀況下我們要怎麼去計算 ProbabilityWithBlank 和 ProbabilityNoBlank ,以下符號 * 代表上一時刻的 prefix,E 代表上一時刻 prefix 的最後一個字元,ε 代表 blank,以下的情況皆是在考慮新字元進來要怎麼去累加 ProbabilityWithBlank 和 ProbabilityNoBlank :
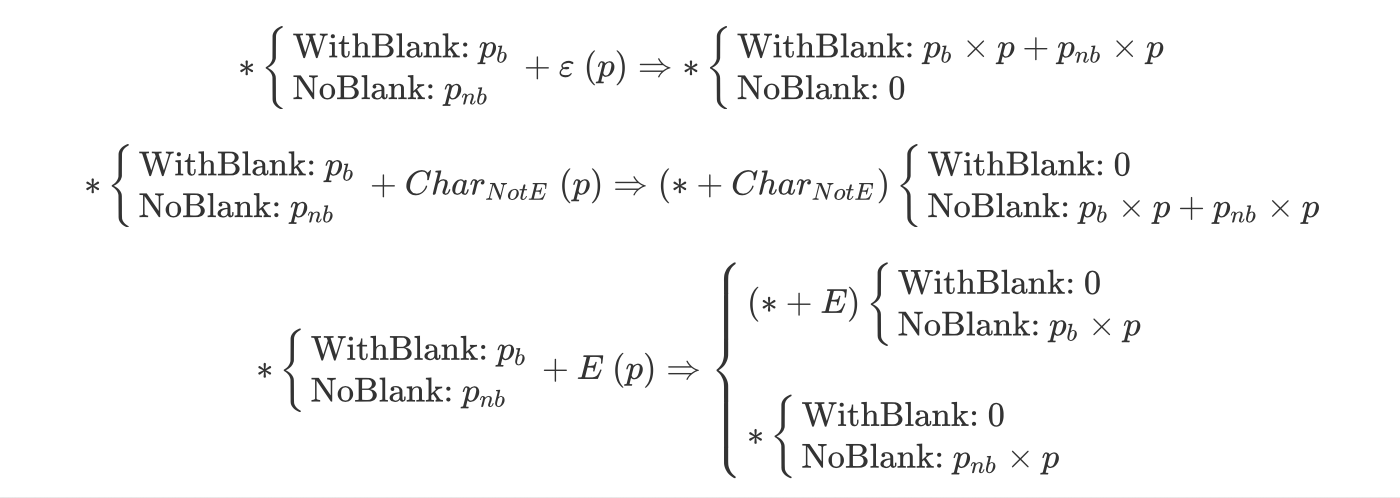
特別注意,以上初始化是遇到新的字元就假設其後會不帶 blank。
當然每次考慮一個新的時間點,我們都需要去累加可能會產生這個 Prefix 的各種情況,因此在以下的程式碼中,我們的 ProbabilityWithBlank 和 ProbabilityNoBlank 是會迭代累加的。當累積完這個時間點的所有 Prefix 機率後,我們會取前 \(k\) 大機率的 Prefix 留下來繼續往下一個時間點累加,此時要用 ProbabilityWithBlank 和 ProbabilityNoBlank 的合來當作排序的依據。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 | |
結語
我們在這篇文章當中清楚的了解到 CRNN 的架構,以及 CTC 的架構、訓練的參數優化和其三種 Inference 方法。看完了這些原理,也該動手試玩看看,在 GitYCC/crnn-pytorch 中已經有已經 pretrained 的模型可以使用,不妨跟著以下步驟實際動手玩玩看 OCR 場景辨識吧!
1 2 3 4 | |
Reference
- An End-to-End Trainable Neural Network for Image-based Sequence Recognition and Its Application to Scene Text Recognition (2015), Baoguang Shi et al.
- Connectionist Temporal Classification: Labelling Unsegmented Sequence Data with Recurrent Neural Networks (2006), Alex Graves et al.
- First-Pass Large Vocabulary Continuous Speech Recognition using Bi-Directional Recurrent DNNs (2014), Awni Y. Hannun et al.
- Sequence Modeling With CTC, Awni Hannun.
- 对《CTC 原理及实现》中的一些算法的解释