剖析深度學習 (3):MLE、MAP差在哪?談機器學習裡的兩大統計觀點
Posted on March 07, 2020 in AI.ML. View: 23,443
深度學習發展至今已經有相當多好用的套件,使得進入的門檻大大的降低,因此如果想要快速的實作一些深度學習或機器學習,通常是幾行程式碼可以解決的事。但是,如果想要將深度學習或機器學習當作一份工作,深入了解它背後的原理和數學是必要的,才有可能因地制宜的靈活運用,YC準備在這一系列當中帶大家深入剖析深度學習。
本講主要探討統計的兩大學派(頻率學派和貝氏學派)對於機器如何學習的觀點。頻率學派主張Maximum Likelihood Estimation (MLE),會提到這等同於最小化data與model之間的Cross Entropy或KL Divergence。而貝氏學派則主張Maximum A Posterior (MAP) ,會提到這會等同於極大化Likelihood並同時考慮Regularization Term,我們也可以在本講看到L1和L2 Regularation Term是怎麼被導出的。
條件機率
因為本講會牽涉到許多條件機率的計算,所以把條件機率常用的公式先列下來,讓大家溫習一下。
-
邊際機率(marginal probability)
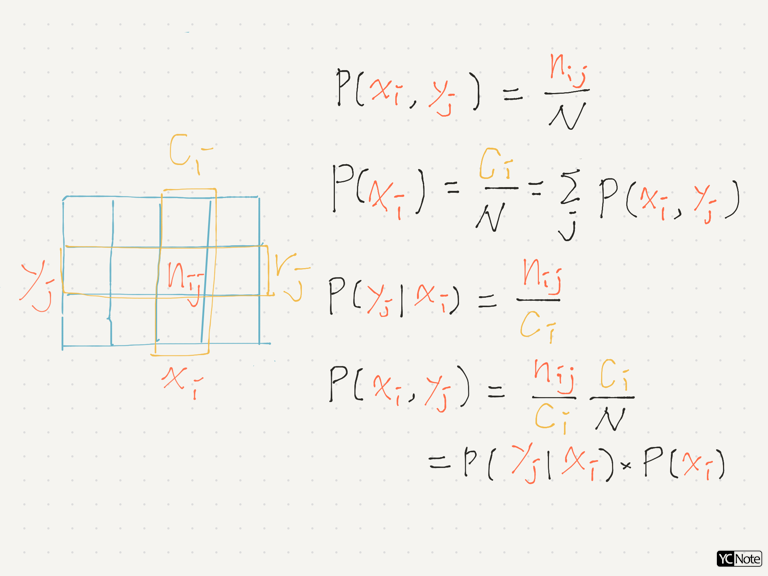
$$ p(X=x_i)=\sum_j p(X=x_i, Y=y_j) \ \ ↪︎【1】 $$(如下圖所示) -
條件機率(conditional probability)
$$ p(X=x_i, Y=y_j)=p(Y=y_j\mid X=x_i)p(X=x_i) \ \ ↪︎【2】 $$(如下圖所示) -
條件機率的鏈鎖法則
$$ p(a,b,c)=p(a\mid b,c)\cdot p(b,c)=p(a\mid b,c)\cdot p(b\mid c)\cdot p(c) \ \ ↪︎【3】 $$(因為 \(a\cap b\cap c=a\cap (b\cap c)\)) -
獨立性
-
if X and Y are independent, \(p(X=x_i,Y=y_j)=p(X=x_i)\cdot p(Y=y_j)\)
- if X and Y are independent, \(p(X=x_i,Y=y_j\mid Z=z_k)=p(X=x_i\mid Z=z_k)\cdot p(Y=y_j\mid Z=z_k) \ \ ↪︎【4】\)
頻率學派 v.s. 貝氏學派
頻率學派和貝氏學派為統計上面重要的兩大觀點,透徹的了解這兩個學派的觀點,可以幫助你在做機器學習或深度學習時選擇模型有所幫助。
舉個例子,如果你在做詞性標記(POS tagging)的任務,你採用隱馬爾科夫模型 (HMM),那麼你採用的是類似貝氏學派的觀點;但如果你採用 Conditional Random Field (CRF),那麼你就是採用類似頻率學派的觀點。
再舉個平易近人一點的例子,Loss Function中的Regularization Term其實可以看作是從先驗機率 (Prior Probability) 來的,這也有貝氏學派的味道,待會會再仔細的介紹。
簡單講,頻率學派相信世界的本質是穩定的,所有現象背後都有一個穩定的母群體,所以我們只要透過來自母群體大量隨機且可重複實驗的事件,就可以透過期望值估算各種統計量,這就是頻率學派的認知:不需要太多其他的人為假設,只需要單純從母群體抽樣即可。
但是貝氏學派不這麼認為,他們認為至少有一些現象是不穩定的,例如:北極的冰是否會在本世紀溶解殆盡,這種問題不存在穩定的母群體讓你可以在短時間內「大量」的量測,因為系統不斷的在演進,因此我們需要有一個具有演進特性的統計模型,那就是貝氏機率,貝氏機率的精髓是演進,手中先握著一個先驗機率 (Prior Probability) ,再透過不斷觀察新的證據來更新手上的機率。
在機器學習上,頻率學派的優點是無額外的假設,相反的貝氏學派需要假設先驗機率 (Prior Probability) ,錯誤的先驗機率可能會去誤導模型,讓它反而忽視甚至曲解數據帶來的信息。另外,貝氏學派的優點也正是因為它有先驗機率,所以在資料筆數不多的情況下較不容易出錯,如果你使用頻率學派的觀點在小樣本上,由於統計量不足可能導致你的估計也不準確。
所以說,先驗機率的使用是把雙面刃,水可載舟亦可覆舟。
Maximum Likelihood Estimation (MLE)
首先我們來看頻率學派,也就是傳統學派,究竟用什麼什麼觀點讓機器學習的,我們從頭到腳來理一遍。
給定一個Dataset \(\mathcal{D}\) ,並且決定好Model的Hyperparameters \(m\),此時我只需要尋找Model權重參數 \(\theta\) ,就可以決定好一個Model。
那怎麼決定 \(\theta\) 呢?頻率學派認為只要先決定好Model (決定\(m\)和\(\theta\)),再算算看這個Model產生Dataset \(\mathcal{D}\) 的機率,這就是Likelihood,我們希望這個Likelihood可以越高越好,也就是Maximum Likelihood。化成數學式子: ⚠️
其中:\(p(\mathcal{D}\mid m,\theta)\) 稱為Likelihood。
而Dataset \(\mathcal{D}\) 理當有多筆資料:
假設從Dataset \(\mathcal{D}\) 抽樣資料的過程每一筆是Independent的,則
再假設從Dataset \(\mathcal{D}\) 抽樣資料的過程是從同一個分布來的 (identically distributed) ,則
接下來,為了方便計算而取 \(\operatorname{ln}\):
再來我們考慮監督式學習的情況,每一筆數據 \(d_i\) 是由一對輸入與輸出所組成 \((x_i, y_i)\) :
因為 \(y_i\) 是depend on \(x_i\) 的,所以使用【3】式將 \(x_i\) 往後搬,得
\(x_i\) 與 model參數 \(m\) 和 \(\theta\) 應該是互相獨立的,
\(p(x_i)\) 與\(\theta\) 無關,在優化過程可忽略,得: ⚠️
上面這個式子是可以透過實驗來找到 \(\theta_{MLE}\) 的,其中 \(p(y_i\mid x_i,m,\theta)\) 表示在Model固定的情況下,估計輸入\(x_i\)會得到\(y_i\)的機率,我們可以透過Grandient Descent的方法調整參數來最大化這一項,詳細怎麼做我會在下一講交代清楚。
還沒有結束喔!大家有沒有覺得【14】式怪眼熟的,這很像是我們在上一講討論的東西。
我們把【14】式乘上負號,再除上資料筆數 \(N\),得
有沒有看出來!沒有的話,我們繼續導下去,\(\frac{1}{N}\sum_i\) 其實就是代表對data的採樣並平均,將它表示成為期望值
所以說Maximum Likelihood就是在最小化Data和Model的Cross Entropy,當\(p_{data}=p_{model}\)時有最小的Cross Entropy,這也間接證明了Maximum Likelihood的最優解就是\(p_{data}=p_{model}\),也就是model分布等同於母體分布。
當然,你也可以說Maximum Likelihood就是在最小化KL Divergence,KL Divergence:
但是因為 \(\operatorname{ln}p_{data}(x)\) 與 \(\theta\) 無關,所以計算還是只剩下第二項的Cross Entropy。
特別注意,剛剛的所有推論並沒有提到我們的問題是Regression問題還是Classification問題,再次強調Cross Entropy並不專屬於Sigmoid或Softmax,甚至下一講我還會提到Mean Squared Error是源於Data分布與Normal Distribution的Cross Entropy。
Maximum A Posterior (MAP)
再來我們聊聊貝氏學派,我們好奇頻率學派究竟有什麼不足?MLE有什麼不足?為什麼我們需要一個新的觀點。
最重要的一點是MLE認為所有 \(\theta\) 出現的機率是均等的,我們優化的目標是 \(p(\mathcal{D}\mid m,\theta)\) [from 【5】],式子中是直接「給定」一組 \(\theta\) ,所以這個 \(\theta\) 怎麼來的、 \(\theta\) 出現的機率,這些都不在MLE的考量當中。
我們知道這樣並不好,假設以下有兩組 \(\theta\) 都可以得到一樣的Likelihood,依照你學機器學習和深度學習的經驗,你會喜歡哪組?
- 第一組: \(\theta_1=0.5,\ \theta_2=0.1,\ \theta_3=-0.1\)
- 第二組: \(\theta_1=1000.0,\ \theta_2=12.5,\ \theta_3=-500.0\)
以前的所學告訴我們第一組比較好,因為 \(\theta\) 接近 0,這樣的參數會讓我的輸入和輸出不會差異太大,Model會比較穩定,比較不會Overfitting,普遍作法是將Loss加入Regularization Term來壓低 \(\theta\) 的大小。
那麼這個Regularization Term究竟怎麼來的?
一開始學機器學習或深度學習時,你應該會覺得貿然的加上Regularization Term怪怪的,而今天你可以從這裡得到更好的解釋。神奇的是!當你在優化MAP時假設了參數 \(\theta\) 分布的同時,Regularization Term會被自然的推導出來,讓我們繼續看下去。
透過【3】式 \(p(\mathcal{D},m,\theta)\) 可以列出以下關係式:
稍作移項可得:
因為 \(m\) 是給定的,我們想要將它向後移,使用【1】、【2】、【3】去轉換右式:
於是我們得到了大名鼎鼎的貝氏定理: ⚠️
其中:
- \(p(\mathcal{D}\mid m,\theta)\) 就是Likelihood,Maximum這一項就是MLE,不用再特別討論。
- \(p(\theta\mid m)\) 稱為先驗機率 (Prior Probability),它所代表的意義正是描述 \(\theta\) 這個參數在給定 \(m\) 之後出現的機率有多大,這一項是先於經驗的,這裡的經驗指的是「這一次的實驗」,而這個 \(p(\theta\mid m)\) 是與本次實驗 \(\mathcal{D}\) 無關的。因此這個 \(p(\theta\mid m)\) 是需要人為給定的,你可以自己假設分布,例如:假設為有最少假設的Normal Distribution,或者是從過去的歷史紀錄去統計出 \(p(\theta\mid m)\) 也行。
- \(p(\mathcal{D}\mid m)\) 稱為資料機率(probability of data),通常數據與模型的Hyperparameters應該是相互獨立的,所以其實可以簡寫成 \(p(\mathcal{D})\) ,這一項只需要統計一下Dataset的分布即可得到。
- \(p(\theta\mid \mathcal{D},m)\) 稱為後驗機率 (Posterior Probability),它所代表的意義是給定數據 \(\mathcal{D}\) 和 Hyperparameters \(m\) 之後,會出現 \(\theta\) 的機率,有注意到嗎?我們在【21】中同時連結了先驗機率和後驗機率,這代表的是手上原先有一個 \(\theta\) 分布(先驗機率),經過觀察數據後,我重新的去更新這個 \(\theta\) 分布(後驗機率),這充分的傳達了貝氏學派的演進概念。
後驗機率也是我們準備要最大化的目標,所以此方法才稱為Maximum A Posterior (MAP) 。
最大化後驗機率MAP是直接問貝氏定理什麼樣的 \(\theta\) 在給定條件下出現機率最大?而最大化Likelihood則是間接的希望找出一組 \(\theta\) 讓Model能產生Data的機率變高,兩者的優化邏輯是不一樣的。
從 【21】式出發:
然後如【6】、【7】、【8】式一樣假設取樣是i.i.d. (independent and identically distributed),得:
接下來,為了方便計算如【9】式取 \(\operatorname{ln}\):
其中 \(-\operatorname{ln}p(d_i\mid m)\) 與 \(\theta\) 無關,可忽略:
第一項其實就是跟MLE一模模一樣樣,所以直接套用【9】到【14】式的推論,得:⚠️
觀察 【26】式,非常清楚的我們在優化第一項就如同優化MLE,但是MAP比MLE多了 \(\operatorname{ln}p(\theta\mid m)\) ,我們就針對這一項來討論,
- 假設 \(p(\theta\mid m)\) 為一個Uniform Distribution,也就是說所有的 \(\theta\) 出現機率均等,則 \(p(\theta\mid m)=const.\),這麼一來這一項在【26】式可以直接槓掉,因為它與 \(\theta\) 無關,此時 \(\theta_{MAP}=\theta_{MLE}\) 。所以說在貝氏學派的觀點下,MLE只是MAP的一個特例,MLE只是假設 \(\theta\) 出現機率均等的MAP,上一講有提過Uniform Distribution為所有分布當中Entropy最大的,也就是不確定程度最大的,也就是人為假設幾乎為零的分布,確實符合頻率學派的觀點:不需要太多人為假設。
但是基於剛剛的推論 \(p(\theta\mid m)\) 的均等並不是我們想要的,我們希望 \(\theta\) 可以多出現在接近 \(\theta=0\) 的附近,因此我們希望 \(p(\theta\mid m)\) 的分布具有 有限Variance且平均值接近0 (\(E_{p(\theta\mid m)}[x]=0\))。此時的第一首選就是Normal Distribution,因為我們在第一講中說過:Normal Distribution是具有限Variance分布中具有最少人為假設的。
- 假設 \(p(\theta\mid m)\) 為一個Normal Distribution且平均值為0,則
$$ p(\theta\mid m)=\frac{1}{\sqrt{2\pi}\sigma}exp\{{-\frac{\theta^2}{2\sigma^2}}\} \ \ ↪︎【27】 $$
代入【26】,並且取負號,得
哇! L2 Regularization Term \(\frac{1}{2\sigma^2}\theta^2\) 就在這不經意間被導出了,所以未來看到L2 Regularization Term就要知道它隱藏了參數分布呈現Normal Distribution的假設。
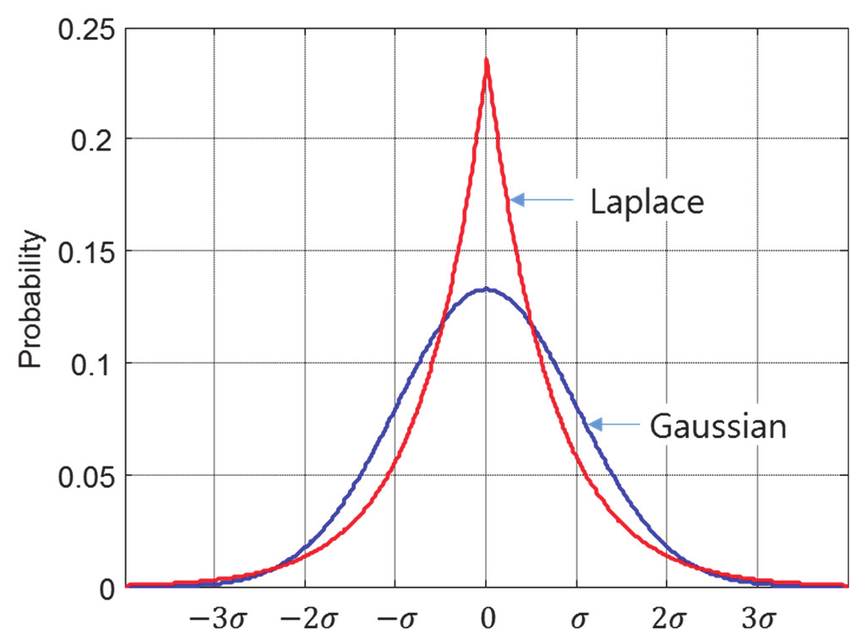
可以預期的,當假設不同的參數分布 \(p(\theta\mid m)\) 就會得到不同型式的Regularization Term,如果我假設Laplace Distribution則會得到L1 Regularization Term,來看一下。
- 假設 \(p(\theta\mid m)\) 為一個Laplace Distribution且平均值為0,則
$$ p(\theta\mid m)=\frac{1}{2b}exp\{{-\frac{|\theta|}{b}}\} \ \ ↪︎【30】 $$
代入【26】,並且取負號,得
第二項就是L1 Regularization Term。
結語
這一講我們清楚的了解了頻率學派和貝氏學派各自的觀點,並且從兩者觀點出發去探討機器學習問題。
頻率學派使用Maximum Likelihood Estimation (MLE) 來優化,優化關係式如下:
此項經過轉換會等同於最小化Data與Model之間的Cross Entropy,或等同於最小化Data與Model之間的KL Divergence,與上一講的資訊理論完美契合。
貝氏學派則使用Maximum A Posterior (MAP) 來優化,優化關係式如下:
除了第一項與MLE一樣之外,此時我們還需考慮了參數可能的分布,當參數分布是均等時,MAP和MLE是等價的。但是我們希望 \(\theta\) 可以接近0,所以一般會去假設 \(p(\theta\mid m)\) 為一個Variance有限且平均值為0的分布,如果選擇使用Normal Distribution,則會得到L2 Regularization Term;如果選擇用Laplace Distribution,則會得到L1 Regularization Term。
本講已經給出了兩個觀點的機率優化式,但是要怎麼變換成擬合問題呢?這需要一大篇幅來介紹,我們會在下一講來仔細討論這個問題,敬請期待囉!
Reference
- Ian Goodfellow and Yoshua Bengio and Aaron Courville. Deep Learning. 2016.
- Christopher Bishop. Pattern Recognition and Machine Learning. 2006.
- 聊一聊机器学习的MLE和MAP:最大似然估计和最大后验估计
- MLE vs MAP: the connection between Maximum Likelihood and Maximum A Posteriori Estimation
- Morgan. ML notes: Why the log-likelihood?
[此文章為原創文章,轉載前請註明文章來源]