機器學習基石 學習筆記 (2):為什麼機器可以學習?
Posted on June 26, 2016 in AI.ML. View: 13,168
前言
在上一回當中,我們初探了機器學習,了解了什麼時候適合使用機器學習,而不是一般的Hard Coding,那今天這篇文章要繼續問下去。
為什麼機器可以學習(Why Can Machines Learn?),本篇會介紹學理上機器學習(ML)必須要有哪些條件才可行,這些理論有非常多的數學,但卻是了解機器學習非常重要的內功,我會盡量避開繁複的數學運算,而帶大家直接的了解式子所要告訴我們的觀念。
機器可以學習嗎?
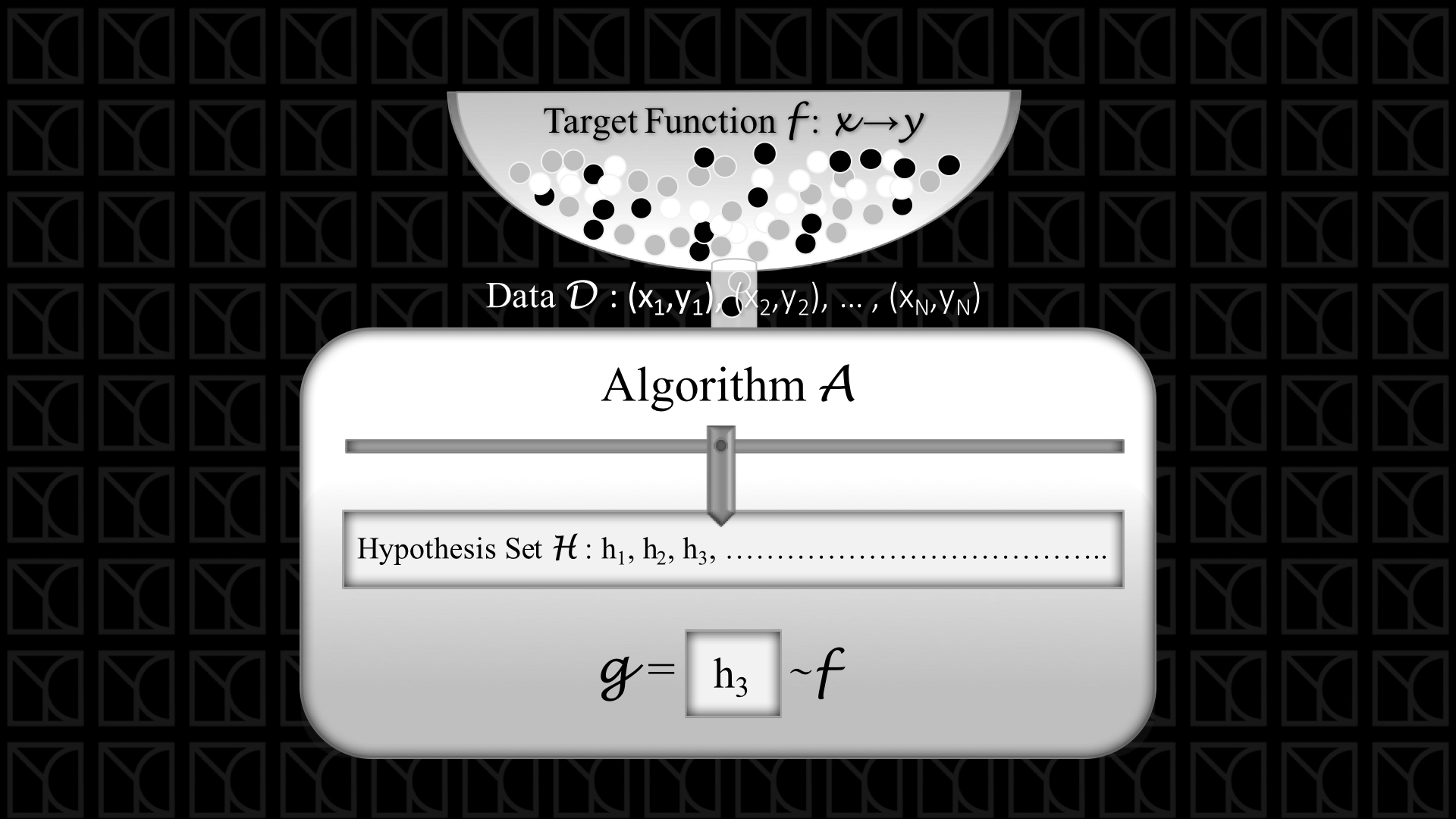
還記得上面這張圖嗎? 上次帶大家初探了Machine Learning(ML)的基本架構,可以把整個概念總結成上面這張圖。
我們來複習一下,先從最上面的盆子開始看起,我們用Target Function代表你想要學習的技能,在非常理想的情況下,也就是沒有noise的情況,每組輸入變數 \(X_n\)都會找到一組精確的輸出 \(y_n\),而這個Target Function能產生多個Data,圖中那些小球就是代表由Target Function產生的Data,今天我從中隨機抽取出\(N\)組Data來做機器學習,接下來Learning Algorithm會利用這些取出的Data去找出最吻合的Hypothesis,那這組Hypothesis就成了我們學習出來的結果,我們可以利用這個結果來預測新的問題。
那麼上面這張圖真的合理嗎? 我們真的有辦法用上面的方法讓機器學習嗎?
先介紹幾個名詞,我們會稱抽樣的Data為In-sample Data,並且稱Hypothesis預測In-sample Data的誤差為In-sample Error,記作\(E_{in}\),因此Learning Algorithm的目的就是找出那組Hypothesis使得\(E_{in}\)最小。
回想一下二元分類問題,在上一篇當中我們使用PLA來挑選Hypothesis Set,還記得我們做了什麼事來確保我們可以得到最佳解嗎? 那就是Pocket的方法,Pocket的目的就是去留住一組能預測最好的Hypothesis,也就是能保留一組最佳參數使得\(E_{in}\)最小。
但如果\(E_{in}\)真的已經可以壓到0了,我們就可以說機器學習已經完成了嗎?
並不是這樣的,回到目的,我們真正希望的是機器有辦法預測新的問題,所以真正的目標是能將「沒有看過的Data」也可以預測好,而不是單單將取樣的Data預測好就夠了。
我們會稱未被取樣的Data為Out-of-sample Data,並且稱Hypothesis預測Out-of-sample Data的誤差為Out-of-sample Error,記作\(E_{out}\),我們最終目的就是把\(E_{out}\)壓下來,也就代表可以預測新的問題。
但遺憾的是我們不會真正知道\(E_{out}\),除非我們知道Target Function,所以我們只能評估\(E_{in}\)來選取Model參數,因此重要的是需要\(E_{in} \approx E_{out}\)這個條件要成立,否則一切的學習都是無效的。
總結一下機器學習的條件,我們必須建立一個 Learning Model可以確保\(E_{in}\approx E_{out}\),所以在Learning Algorithm選出最小\(E_{in}\)的Hypothesis,同時這組Hypothesis也可以很好的預測Out-sample,我們就可以說機器已經會學習了。
\(E_{in}\)和\(E_{out}\)的差異
剛剛我們已經提到了如果機器能學習,那就必須先確保\(E_{in} \approx E_{out}\),下面我會引入Hoeffding不等式來說明這個條件怎麼成立。
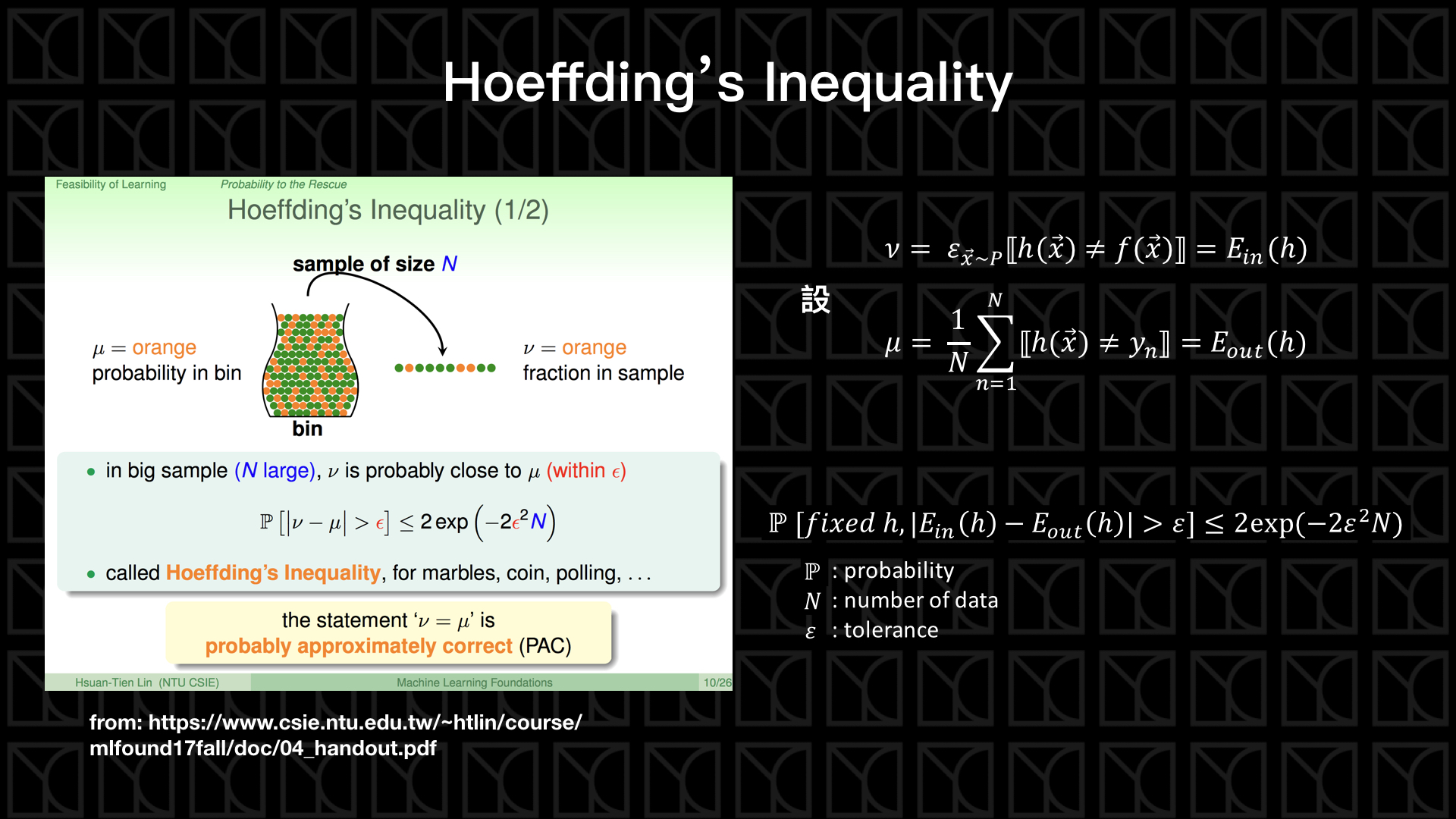
先想像一下我有一個桶子,這個桶子裝了兩種顏色的小球,分別為橘色和綠色,今天如果桶子內橘色球佔的比例為\(μ\),而今天我們從中隨機抽樣出\(N\)顆小球,並且計算出這\(N\)顆小球中橘色佔的比例為\(ν\),此時我們可以想像的到,\(μ=ν\)不一定會成立,但\(μ\)也不至於離\(ν\)太遠,所以Hoeffding不等式就告訴我們\(|μ-ν|\)會被限制在一個範圍內,表示為:
當\(ε\)越大,出現的機率就越低。
接下來我們再把橘球和綠球的意義換成是,一組Hypothesis預測每筆Data的好或壞,預測正確的是綠球,預測失敗的是橘球,所以對於In-Sample來說,\(μ\) 就是 \(E_{in}\)
對於Out-Sample來說,\(ν\) 就是 \(E_{out}\)
套入剛剛的不等式,得
上面這個式子告訴我們\(E_{in}\)和\(E_{out}\)差距超過\(ε\)的可能性是被限制住的,只要抽樣的數量\(N\)夠多,基本上\(E_{in}\approx E_{out}\)就成立,我們這邊定義那些超出\(ε\)的Data為Bad Data(不好的數據),Bad Data出現的可能是被Bound住的,所以機器學習是有可能的。
而事實上,我們的hypothesis不會只有一個,所以接下來來考慮如果有M個Hypotheses的情況下我們的\(E_{in}\)和\(E_{out}\)的差異會怎麼被參數影響。
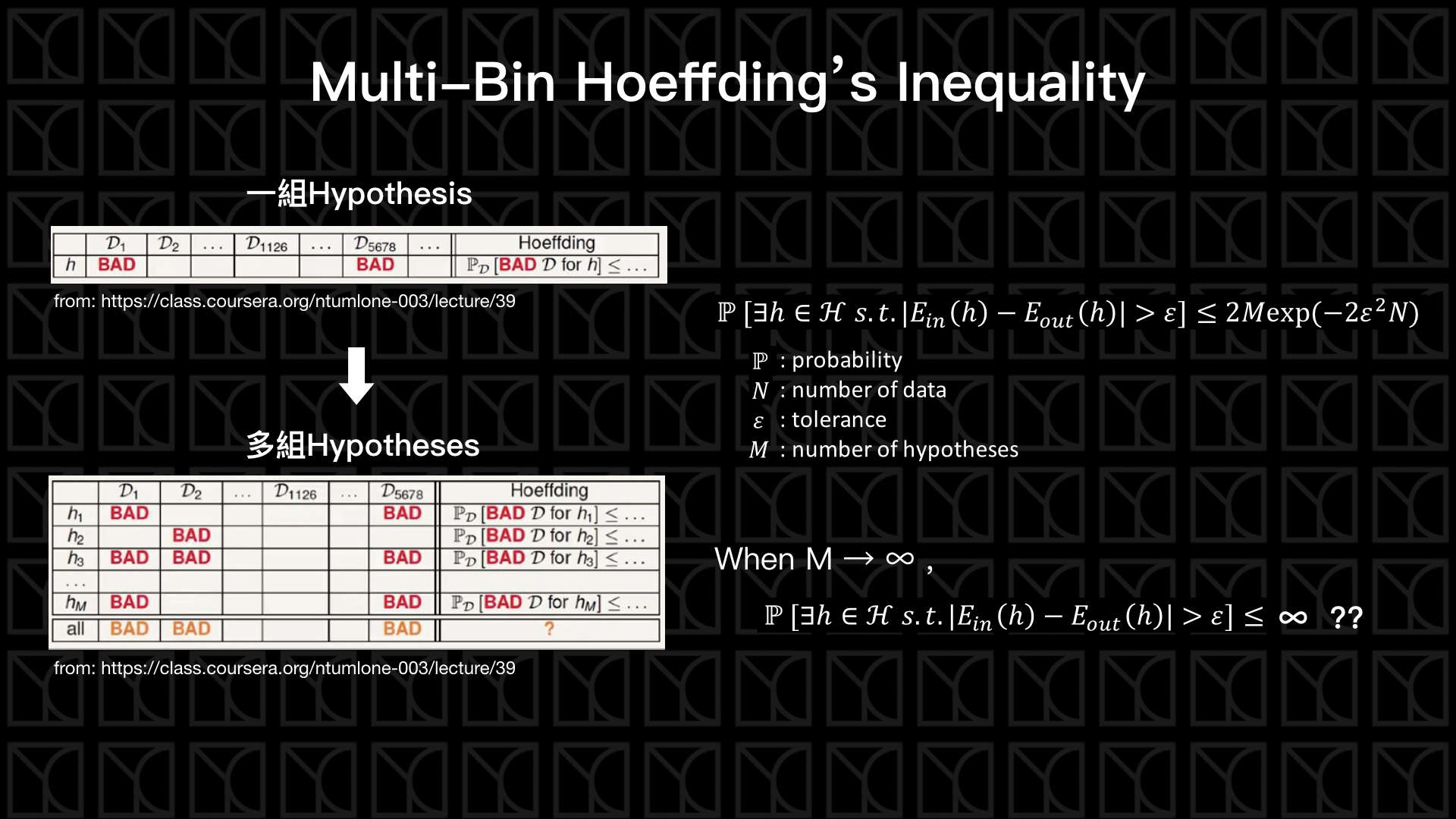
如果我們考慮M組Hypotheses,就會發現每種Hypothesis出現Bad Data的地方可能不一樣,因此大大的減少能使用的Data,如上圖左側所示。
今天如果我有1000份從Target Function取\(N\)個Data的情形,然後只用一個Hypothesis來衡量,根據Hoeffding's Inequality,1000份裡面假設大概5份會出現Bad Data,但今天我再增加一組Hypothesis來衡量,對於這個Hypothesis也可能有自己的5份Bad Data,如果很不幸的,剛剛好這5份Bad Data和前5份沒有重疊,因此用這兩個hypotheses來評估的話,1000份裡頭將會出現10份的Bad Data,由此類推,如果有\(M\)組Hypotheses,最差的情況會發生在什麼時候呢? 那就是\(M\)個Hypotheses的每份Bad Data彼此都沒有交集,夠慘吧! 所以把這些出現Bad Data的機率取聯集得到以下式子:
大家現在回想一下上一篇所提到的Perceptron Hypothesis Set就會發現,糟糕了! Perceptron Hypothesis Set 裡有無限多組的Hypotheses,也就是\(M→∞\),那我們不就需要無限多的Data才能做到\(E_{in} \approx E_{out}\),否則機器根本不會學習,所以前一篇的內容都在亂講,PLA根本無法學習,因為\(E_{in} \approx E_{out}\),就算\(E_{in}\)很小也不代表學習成立,機器學習是不可能的。等一下!先沉住氣,聽我接下來慢慢解釋,你就會發現還有一線生機。
VC Generalization Bound
問題出在這裡,我們在Multi-Bin Hoeffding’s Inequality中採用了一個假設,就是假設每組Hypotheses的Bad Data彼此間都沒有重疊,所以在\(M→∞\)的情況下,當然會有一個無限大的上限值,但如果考慮了Bad Data重疊的情形,縱使\(M→∞\)的情況下還是有機會把Bad Data的出現機率壓在一個有限的定值之下。
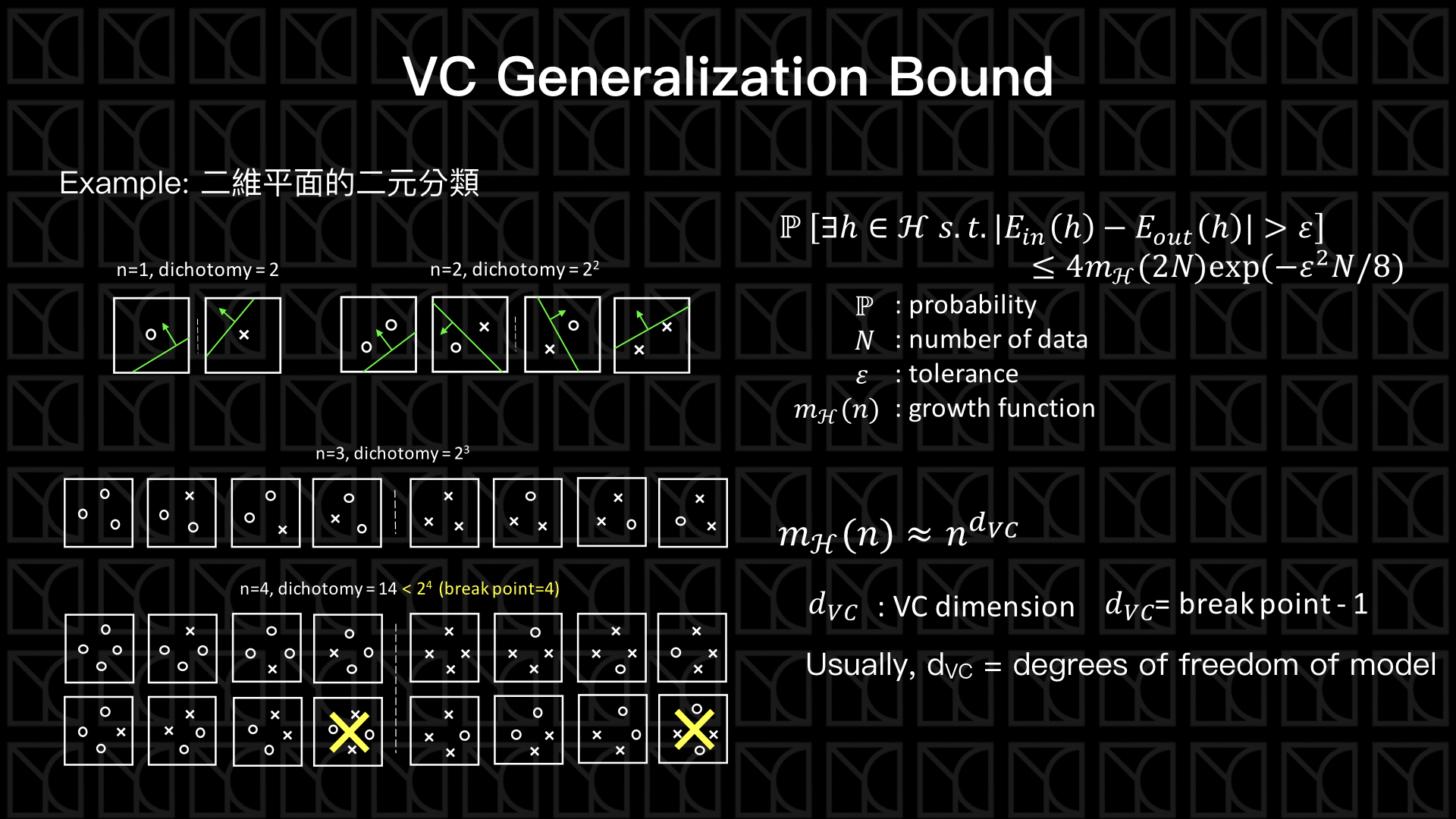
我們回到二元分類問題,看一下上圖中左側的圖例,如果今天在二維平面上做二元分類,當數據量只有1個\(n=1\)時,就算你的切法有無窮多種,但對於一組Data來說就只有兩類Hypotheses而已,再來看\(n=2\)的情況,一樣的無限多組的切法但Hypotheses也只能歸類成4類。
所以Hypotheses用來描述數據的情況是彼此有所重疊的,也就是Bad Data出現的情形在許多Hypotheses是相同的。
但是聰明的你一定想到,如果今天\(n\)的數量不斷的增加,則Hypotheses被分類的數量就會成指數 \(2^n\) 增加,Hypotheses彼此之間Bad Data的重疊情況就會漸漸減少,因此仍然無法限制住Bad Data的數量。
先別緊張,我們繼續看下去,當\(n=3\),沒有意外的Hypotheses會被分類為8類,那接下來\(n=4\)時,你就會發現一個有趣的現象,開始有一些分類情況是不會出現的,因為它無法被一分為二,因此我們擔心因為Data數量增加而造成Hypotheses的種類暴增的情形被排除了,有一些狀況是不會出現的,Hypotheses是有重疊的。
剛剛所提到的分類方式的數量稱為Dichotomy。在\(n=1\)、\(n=2\)到\(n=3\)的情形,所有列得出來的方式都可被完整分類開來,我們稱這情形為Shatter,但是到了\(n=4\)的時候,有些不可能被分類的情形出現了,稱為不可被Shatter,另外我們又稱此情形開始發生的那點為Break Point,這邊注意一下喔! 會不會存有Break Point取決於你的Hypothesis Set長怎麼樣,現在這個例子的Break Point在\(n=4\),其他的Hypothesis Set就不一定了。
Break Point的出現非常重要,他所代表的是Bad Data的出現機率不會無所限制的大下去,因此把這概念帶入Multi-Bin Hoeffding’s Inequality,經過繁複的計算,就可以得到以下公式:
,原本的\(M\)消失了,取而代之的是Growth Function \(m_{\mathbb{H}}(2N)\),Growth Function與Data數量\(N\)有關,這就是我們剛剛解說的,決定Hypothesis Set的種類的其實是 Data的數量\(N\)。
那麼Growth Function要怎麼和Break Point連結起來呢?
先定義一下VC Dimension:\(d_{VC}= Break Point-1\),Break Point代表首次出現不Shatter的情況,那比它小一級代表的正是最大可以Shatter的點,上面的例子中\(d_{VC}=3\)。而這個VC Dimension就可以和我們在意的Growth Function連接起來,經過數學推倒可以得到以下關係式:
所以我們就知道啦!只要有Break Point存在,VC Dimension就是一個有限的值,也因此Growth Function是一個有限的值,VC Bound就產生了,就可以確保Bad Data出現的機率被壓在一個定值之下,所以一樣的只要資料量\(N\)夠多就可以確保\(E_{in} \approx E_{out}\),機器將可以學習。
另外一件重要的事,VC Dimension在數學上是有意義的,\(d_{VC} \approx 可調控變數的個數\),像是上述的二維二元分類問題,它的可調控變數有\(w_0\), \(w_1\) 和 \(w_2\),總共3個,所以\(d_{VC}=3\)。也就是說Hypothesis Set的可調變參數如果是有限,大部分都可以做機器學習。
機器要能學習的三要素
前面拉哩拉雜的講了一堆,終於要推出我們的結論了! 所以如果剛剛的數學讓你感到很挫敗,沒關係,讀懂這段那就足夠了。
從VC Generalization Bound,我們可以知道機器學習是可能的,只要它具備三點要素:
- Good Hypothesis Set: Hypothesis Set 必須有Break Point的存在,也意味著VC Dimension是有限的,而且越小越好,在意義上代表可以調控的變數不要太多。
- Good Data: 數據量越大越好,可以壓低VC Generalization Bound
- Good Learning Algorithm: 以上兩點可以確定的是\(E_{in} \approx E_{out}\),接下來好的Learning Algorithm要有能力找到\(E_{in}\) 最小的參數。很直觀的,當我們可以調控的變數越多,我們的選擇就越多,也就是我們可以找到更小\(E_{in}\) 的機會變多了,所以可以調控的變數不可以太少。
眼尖的你有沒有發現矛盾啊! 可以調控的變數很少,我們能確保\(E_{in} \approx E_{out}\),但是如果我想要找到更小的\(E_{in}\) 又必須有更多的調控變數,這個矛盾是機器學習上一個重要的課題,解法是我們必須要能找到適當的調控變數數量,也就是適當大小的\(d_{VC}\) 。
from: https://d396qusza40orc.cloudfront.net/ntumlone/lecture_slides/07_handout.pdf
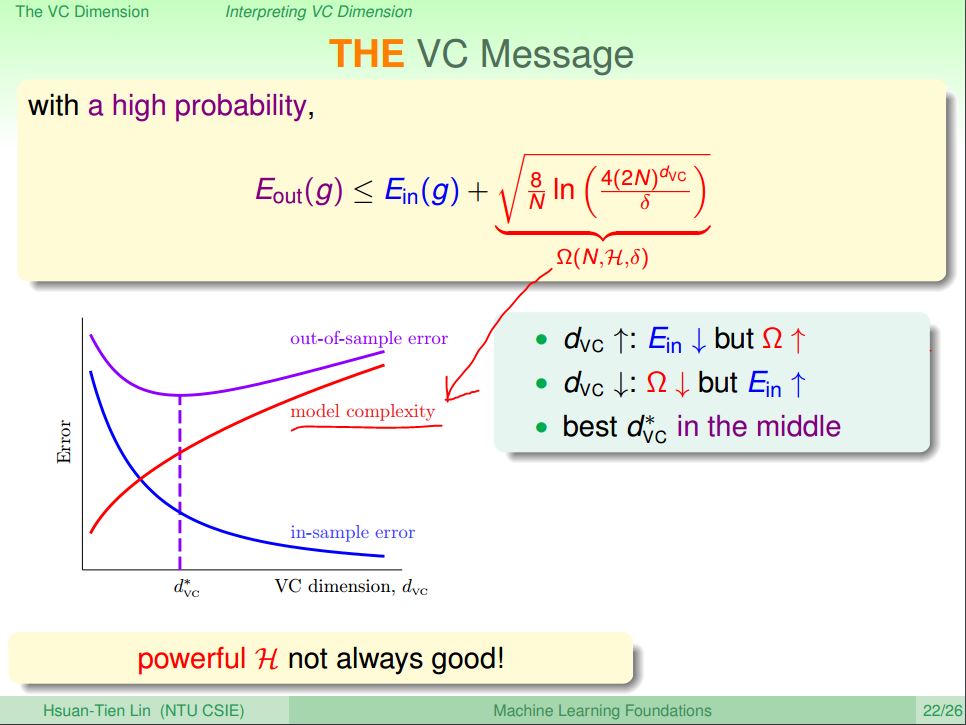
上圖中,我們把VC Generalization Bound公式帶入Growth Function和\(d_{VC}\)的關係式,並且設\(δ\) 為最大可以容忍的Bad Data出現機率,把它帶入取代掉\(ε\),整理一下,就可以推出上圖的公式,\(\Omega (N,\mathbb{H},δ)\)稱為Model Complexity,這一項代表的是Hypothesis Set的大小造成的模型複雜度,它隨著\(d_{VC}\)增加而增加。Model Complexity越大代表Bad Data更容易出現,所以\(E_{in}\)和\(E_{out}\)開始被帶開了。
這個現象有一個很常見的名字叫做Overfitting,指的是使用非常複雜的Model來Fitting,雖然可以把手頭上的數據Fit的很漂亮,但是拿到其他的數據來看就會發現這Model的預測性非常的差,原因就是因為Model Complexity造成\(E_{in}\)和\(E_{out}\)脫鉤了,所以選擇一個複雜度適中的Model是很重要的。
機器學習架構一般化
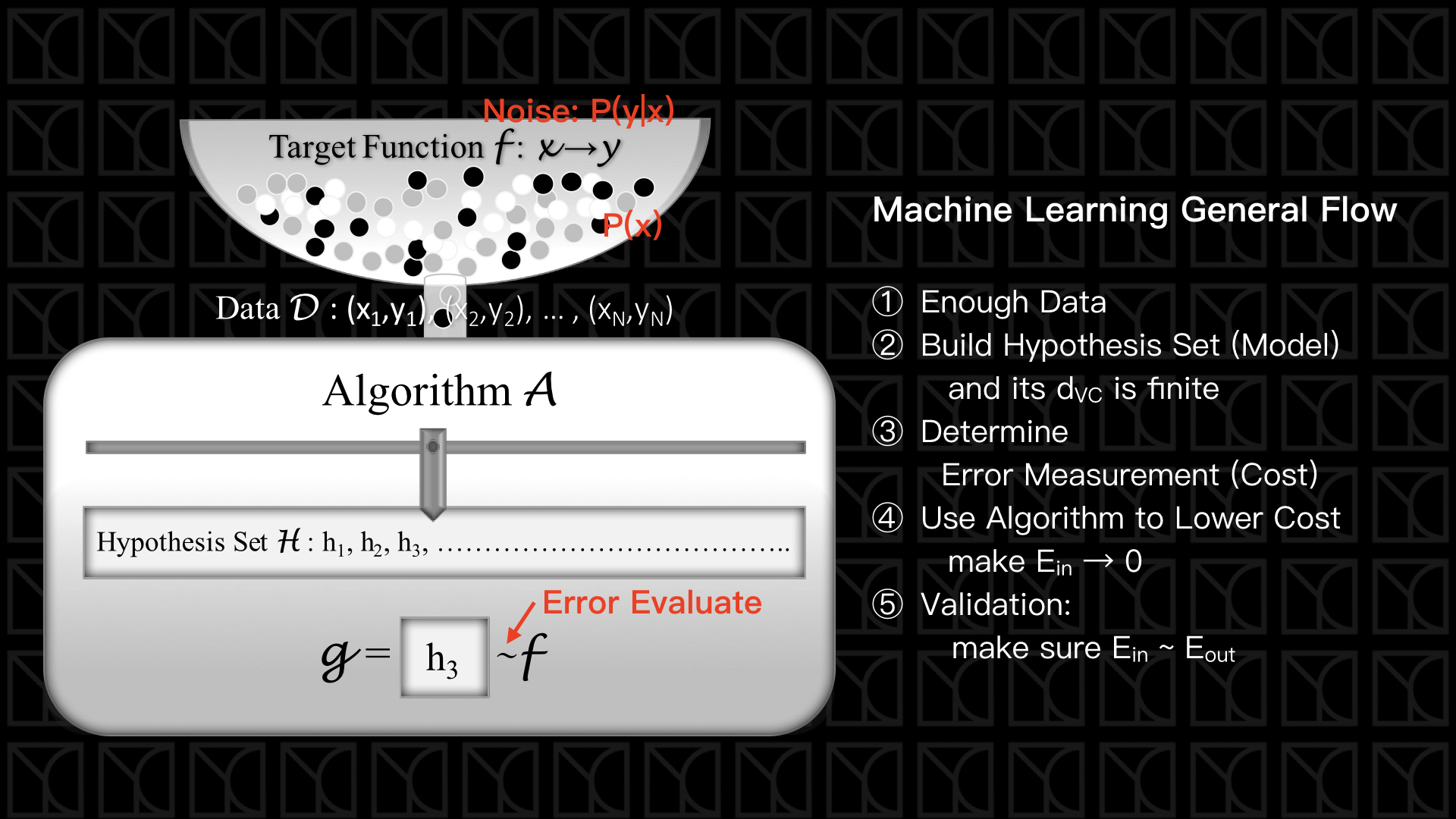
最後我們來總結一下機器學習的流程,上圖中是之前提到的機器學習的架構並額外考慮一些真實情形,
- 每筆Data出現的機會不一定,同樣的採樣結果也是會受機率的影響,所以上圖中標示為\(\mathbb{P} (x)\),這個修改並不會影響機器學習的流程和結果。
- Data可能會受到Noise的影響,所以給定\(X_n\)並不一定會百分之一百得到\(y_n\),他存在著可能會出錯,上圖標示為\(\mathbb{P}(y|x)\),我們可以增大我們採樣的數量\(N\)來減少Noise的影響。
- 我們是採用\(E_{in}\)來當作選擇Model參數的指標,因此我們需要訂出Error的評估方式,常見的有Squared Error \(E_{squared} = (y_n - y_{prediction})^2\)。
跟著架構我們就有一套機器學習的標準流程,
- 準備好足夠的數據
- 把Model建立好,\(d_{VC}\)必須要是有限的,而且大小要適中
- 定義好評估\(E_{in}\)的Error Measurement
- 使用演算法找出最佳參數把\(E_{in}\)降低
- 最後評估一下是否有Overfitting的狀況,確保\(E_{in} \approx E_{out}\)(未來會講怎麼做)